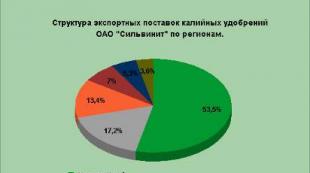
চাঁদে প্রথম চন্দ্র রোভার। কেন ইউএসএসআর চাঁদে "লুনার রোভার" পাঠিয়েছিল? কেন চন্দ্র রোভার অপারেটর শ্রেণীবদ্ধ করা হয়েছিল?
যদি আমরা ধরে নিই যে আমাদের মনে কোনো ভাই নেই, তাহলে এই পরিবহনটিকে সমগ্র মহাবিশ্বের মধ্যে সবচেয়ে নির্ভরযোগ্য হিসাবে বিবেচনা করা যেতে পারে। আমেরিকানরা গণনা করে না: তারা চাঁদে তাদের লুনার রোভার দুবার মেরামত করেছে। আমাদের "লুনোখোড", যদি "ফ্লাইট" এর সময় এটি ভেঙে যায় তবে এটি মেরামত করার জন্য কেউ থাকত না - ক্রু এটি থেকে 400 হাজার কিলোমিটার দূরে ছিল ...
ড্রোন চ্যাসিস
অন্যান্য গ্রহের অন্বেষণে, আমরা, যেমন একাধিকবার ঘটেছে, আমাদের নিজস্ব পথে চলেছি। মানুষের পরিবর্তে, ইউএসএসআর একটি প্রতিবেশী গ্রহে একটি রোবোটিক এক্সপ্লোরার পাঠানোর সিদ্ধান্ত নিয়েছে।
একজন জীবিত মহাকাশচারী যা করতে পারে তার সবকিছু করতে সক্ষম হওয়ার জন্য তার একটি গাড়ির প্রয়োজন ছিল। মূল সমস্যাটি ছিল চ্যাসিস, এবং লেনিনগ্রাডের সামরিক গবেষণা ইনস্টিটিউট, যেটি চ্যাসিস ডিজাইন করেছিল, এটি সমাধানের জন্য নিযুক্ত ছিল। সামরিক ডিজাইনাররা ভাল পুরানো চাকায় স্থির হয়েছিলেন, শুঁয়োপোকা ট্র্যাক প্রত্যাখ্যান করে, হাঁটা, লাফানো, ঘূর্ণায়মান... লুনোখোড চ্যাসিসের জন্য বেশ কয়েকটি সংজ্ঞায়িত প্রয়োজনীয়তা ছিল।
প্রথমত, প্রপালশন ডিভাইসটি অবশ্যই সর্বজনীন হতে হবে যাতে এটি রোভারটিকে "অবতরণ" করার সম্ভাবনাকে হ্রাস করে - এটিকে ধাক্কা দেওয়ার মতো কেউ থাকবে না! এবং, জীবন যেমন দেখাবে, স্পেস রোবটগুলির "দোলাতে" সমস্যা রয়েছে। এছাড়াও, ট্রেড প্রোফাইলটি ঢালে গাড়ি চালানোর সময় গাড়িটিকে পাশের দিকে পিছলে যাওয়া থেকে আটকানোর কথা ছিল। দ্বিতীয়ত, নির্ভরযোগ্যতা গুরুত্বপূর্ণ, এবং একটি চাকার চেয়ে সহজ কি হতে পারে? এখানে, উপায় দ্বারা, তৃতীয়ত, এর সরলতার কারণে, চাকাটি একটি অত্যন্ত হালকা ইউনিট। অবশেষে, এটি সবচেয়ে দক্ষ প্রপালশন সিস্টেমগুলির মধ্যে একটি এবং সর্বনিম্ন শক্তি খরচ প্রয়োজন। চাকার সাথে একটি চ্যাসিসের ব্যবহার তাদের সংখ্যার পরিবর্তন করা সম্ভব করে তোলে এবং মাটিতে চাপ কমানোর পাশাপাশি, এটি গাড়ির বেঁচে থাকার ক্ষমতা বাড়ানোর একটি সুযোগ - গেম থেকে ব্যর্থ চাকাগুলিকে বাদ দিয়ে।

চাকা পুনরায় উদ্ভাবিত হয়
সত্য, চাকাটি উল্লেখযোগ্যভাবে পরিবর্তন করতে হয়েছিল, প্রাথমিকভাবে কারণ 1960 এর দশকের শেষের দিকে লোকেরা খুব মোটামুটিভাবে জানত যে চন্দ্রের মাটি কী। অপ্রত্যাশিত ঘনত্বের আলগা শিলাগুলির সাথে সমস্ত ক্যালিবারের পাথরের সংমিশ্রণের জন্য পরস্পরবিরোধী বৈশিষ্ট্য সহ একটি চাকা প্রয়োজন। এবং সামরিক বাহিনী এটি করেছে। তিনটি পাতলা টাইটানিয়াম রিমগুলি একটি শক্ত পৃষ্ঠের উপর সহজেই ঘূর্ণিত হয়, তাদের মধ্যে প্রসারিত জালটি আলগা মাটিতে কার্যকর হয় যখন রিমগুলি ব্যর্থ হতে শুরু করে। সমস্ত কিছুর উপরে ঢালাই করা অ্যাঙ্গেল লগগুলি লোডের নীচে একটি আলগা পৃষ্ঠে রেক করতে সহায়তা করেছিল। এটি পরে পরিণত হয়েছে, তারা আমাদের চেয়ে বেশি ঘন ঘন চাহিদা ছিল. পাথরের সাথে চাকার শক্ত যোগাযোগের ক্ষেত্রে ডিস্কের পরিবর্তে হালকা স্পোকগুলি প্রয়োজনীয় শক্তি এবং স্থিতিস্থাপকতা সরবরাহ করে।

গণনা এবং অসংখ্য পরীক্ষার ফলস্বরূপ চাকার চূড়ান্ত সংস্করণের জন্ম হয়েছিল। প্রোটোটাইপগুলি বিভিন্ন ধরণের মাটি সহ তিনটি প্রশিক্ষণ গ্রাউন্ডে এবং এমনকি চন্দ্র মাধ্যাকর্ষণ অনুকরণকারী একটি বিমানের বগিতেও রোল করা হয়েছিল, যা পৃথিবীর 1/6। উদাহরণস্বরূপ, রিমের উপরে প্রসারিত জাল ঘরের আকার নির্বাচন করতে অনেক সময় লেগেছে।
একটি গিয়ারবক্স এবং একটি স্কুইব সহ একটি ডিসি বৈদ্যুতিক মোটর পাতলা চাকা হাবের মধ্যে তৈরি করা হয়েছিল। ড্রাইভের জরুরী জ্যামিংয়ের ক্ষেত্রে পরবর্তীটি দূরবর্তীভাবে হ্রাস করা হয়েছিল এবং চাকাটি, এইভাবে গিয়ারবক্স অক্ষ থেকে সংযোগ বিচ্ছিন্ন হয়ে ড্রাইভার থেকে চালিত একটিতে পরিণত হয়েছিল, অর্থাৎ, এটি কেবল পৃষ্ঠ বরাবর ঘূর্ণিত হয়েছিল। এইভাবে, সরাসরি মানুষের হস্তক্ষেপ ছাড়াই উপলব্ধ আটটির মধ্যে পাঁচটি চাকার ড্রাইভ "মেরামত" করা সম্ভব হয়েছিল এবং ডিভাইসটি বাকি তিনটি চাকার সাথে কাজটি চালিয়ে যেতে পারে!
স্নায়ু 400 হাজার কিমি দীর্ঘ
ইউএসএসআর চন্দ্র প্রকল্পের সবচেয়ে কঠিন বিন্দু ছিল লুনোখোড নিয়ন্ত্রণ। এটি দূরবর্তী ছিল, এবং আরও দূরবর্তী খুঁজে পাওয়া কঠিন ছিল: চাঁদে বৃষ্টির সাগর থেকে দূরত্ব, যেখানে আমাদের স্পেস রোবট অবতরণ করেছিল, ক্রিমিয়ার ডিপ স্পেস কমিউনিকেশনের কেন্দ্রে, যেখানে এর ক্রু অবস্থিত ছিল, 400,000 কিলোমিটার অতিক্রম করেছে।

কমান্ড রেডিও সংকেত এই পথটি 2.5 সেকেন্ডের মধ্যে কভার করে, অর্থাৎ, এই ধরনের বিলম্বের সাথে ডিভাইসটি ড্রাইভারের আদেশে সাড়া দেয়। কিন্তু এটি মূল সমস্যা ছিল না। প্রধান অসুবিধা ছিল অপারেটরের সামনে মনিটরে ইমেজ আপডেট করার গতি। লুনোখড ক্যামেরা থেকে পৃথিবীতে ছবি পাঠানোকে শুধুমাত্র টেলিভিশন বলা হয়, ড্রাইভার তার সামনে দেখেছিল, এটিকে হালকাভাবে বলতে গেলে, একটি স্লাইড শো: ফ্রেমটি প্রতি সেকেন্ডে 25 বার নয়, প্রতি 3-20 বার পরিবর্তিত হয়েছিল; সেকেন্ড (ভূখণ্ডের উপর নির্ভর করে)! কিছু করার নেই - যোগাযোগের চ্যানেল এবং সেই সময়ের কম্পিউটিং মেশিনগুলি দ্রুত ডেটা স্থানান্তর সরবরাহ করতে পারেনি। এইভাবে, একটি বাধা সনাক্ত করার পরে, গাড়িটি কমপক্ষে 8 সেকেন্ডের জন্য চলতে থাকে! এ কারণে চালকরা কখনই 2 কিমি/ঘন্টার বেশি গতিতে গাড়ি চালায় না।
সমস্যাটি চন্দ্র আলোর অদ্ভুততার দ্বারা আরও বেড়ে গিয়েছিল - এতটাই তীক্ষ্ণ এবং বিপরীত যে ট্র্যাফিক পরিস্থিতি "উইন্ডশীল্ডের পিছনে" অপারেটরকে কালো এবং সাদা দাগের সেট হিসাবে দেখায়। কিছু দিনে, যখন সূর্য তার শীর্ষে ছিল, তখন "ভ্রমণ" করা অসম্ভব ছিল। অতএব, ড্রাইভারের চোখকে সাহায্য করার জন্য, ডিভাইসটি তাকে অতিরিক্ত সেন্সর থেকে ডেটা পাঠিয়েছে: রোল, ট্রিম, লোড এবং হুইল স্লিপ। তাদের বিশ্লেষণ করে, ক্রুরা দ্রুত বুঝতে পেরেছিল যে তাদের গাড়িতে কী ঘটছে: এটি একটি পাথুরে পাহাড়ের উপর কাত হয়ে একটি গর্তে নেমে গেছে, 90 শতাংশ পিছলে সেখান থেকে উঠে গেছে... ক্রুদের কাজ এতটাই তীব্র ছিল যে তিনি এটি সহ্য করতে পারেননি দুই ঘন্টারও বেশি সময় "চাকার পিছনে।"
1 / 6
2 / 6
3 / 6
4 / 6
5 / 6
6 / 6
ভিতরে কি?
যাইহোক, ক্রু সম্পর্কে. এতে পাঁচজন ছিল। ড্রাইভার ছাড়াও, যারা লিভারে বসেছিলেন (তিনি লুনোখোডকে ট্যাঙ্কের মতো ঘুরিয়েছিলেন, চাকার ব্রেক দিয়ে), সেখানে একজন নেভিগেটর, একজন ফ্লাইট ইঞ্জিনিয়ার, একজন উচ্চ দিকনির্দেশক অ্যান্টেনা অপারেটর এবং একজন ক্রু কমান্ডারও ছিলেন। যাই হোক না কেন, এমনকি অন্যান্য অনুকূল পরিস্থিতিতেও, এই সমস্ত লোক তাদের গাড়িতে ফিট করতে পারেনি, যেহেতু এর গোলাকার দেহ (সর্বোচ্চ ব্যাস 2,150 মিমি) সম্পূর্ণরূপে বৈজ্ঞানিক সরঞ্জাম এবং চেসিস পরিচালনার জন্য দায়ী সিস্টেম দ্বারা দখল করা হয়েছে। রোভারের প্রপালশন মোটরগুলি সিলভার-ক্যাডমিয়াম ব্যাটারি দ্বারা চালিত ছিল, যা উপরের কভারের উপর স্থাপিত সোলার প্যানেল দ্বারা চার্জ করা হয়েছিল। রাতে (একটি চান্দ্র রাত, একটি চন্দ্র দিনের মতো, প্রায় 14 পৃথিবী দিন স্থায়ী হয়), শরীরের তাপ সংরক্ষণের জন্য ঢাকনাটি বন্ধ করে দেওয়া হয়েছিল এবং এই সময়ে ডিভাইসটি "অ্যানাবায়োসিস" এ বরফ হয়ে যায়। কারণ শক্তিশালী হেডলাইটের অভাব নয়, সূর্য ছাড়া ব্যাটারি রিচার্জ করার ক্ষমতার অভাব।
1 / 2
2 / 2
লুনোখোডের অন্যতম প্রধান ব্যবস্থা ছিল জলবায়ু নিয়ন্ত্রণ ব্যবস্থা, যা রাতে -150 °C এবং দিনের বেলা +150 °C এর বাইরের তাপমাত্রায় একটি সিল করা আবাসনে পছন্দসই তাপমাত্রা সরবরাহ করে। তাপের উত্সটি ছিল রেডিওআইসোটোপ পোলোনিয়াম -210 ধারণকারী একটি ক্যাপসুল এবং আবাসনের ছাদের মাধ্যমে অতিরিক্ত তাপ সরানো হয়েছিল, যা একটি রেডিয়েটর ছিল। কুল্যান্ট গ্যাস দুটি সার্কিটের মাধ্যমে আবাসনের অভ্যন্তরে সঞ্চালিত হয়, দ্বিতীয়টি বিশেষভাবে কঠোর তাপ ব্যবস্থার সাথে সরঞ্জামগুলির জন্য বরাদ্দ করা হয়। সেই সময়ের জলবায়ু নিয়ন্ত্রণের দক্ষতা এত বেশি ছিল যে এটি ডিভাইসের বাম এবং ডান দিকের তাপমাত্রার পার্থক্য 100 ডিগ্রি হলে সরঞ্জামগুলির সুরক্ষা সম্পর্কে চিন্তা না করা সম্ভব হয়েছিল!
ওয়ারেন্টি
পরীক্ষামূলক সংস্করণ এবং প্রশিক্ষণ কপি গণনা না করে লুনোখোডের মোট চারটি কপি তৈরি করা হয়েছিল। প্রথম "কমব্যাট" প্রোটোটাইপ, যা পরে "লুনোখোড-০" নাম দেওয়া হয়েছিল, উৎক্ষেপণের সময় রকেট দুর্ঘটনার কারণে এটি মহাকাশে যেতে পারেনি। লুনোখোড-১ নামের দ্বিতীয় যানটি চাঁদে ১০,৫৪০ মিটার ভ্রমণ করেছে, অনেক বৈজ্ঞানিক কাজ সম্পন্ন করেছে। নির্মাতা - প্রতিরক্ষা এন্টারপ্রাইজ মেশিন-বিল্ডিং প্ল্যান্ট যার নাম S. A. Lavochkin - তার ব্রেইনচাইল্ডের তিন মাসের নিরবচ্ছিন্ন অপারেশনের গ্যারান্টি দেয়, কিন্তু লুনোখোড-1 প্রায় এক বছর কাজ করে, 17 নভেম্বর, 1970 থেকে 15 সেপ্টেম্বর, 1971 পর্যন্ত। অপারেশন করতে হয়েছিল। এর পরে থামল কীভাবে আইসোটোপ তাপ উত্স তার সংস্থানকে নিঃশেষ করে দেয় এবং আট চাকার রোবটের "ভর্তি" শেষ পর্যন্ত 150-ডিগ্রী শীতল রাতে বরফ হয়ে যায়...
17 নভেম্বর, 1970-এ, লুনা-17 স্বয়ংক্রিয় স্টেশন পৃথিবীর প্রথম গ্রহের রোভার, লুনোখোড-1, চাঁদের পৃষ্ঠে পৌঁছে দেয়। ইউএসএসআর বিজ্ঞানীরা সফলভাবে এই প্রোগ্রামটি বাস্তবায়ন করেছে এবং শুধুমাত্র মার্কিন যুক্তরাষ্ট্রের সাথে প্রতিযোগিতায় নয়, মহাবিশ্বের অধ্যয়নেও আরেকটি পদক্ষেপ নিয়েছে।
"লুনোখোদ-০"
অদ্ভুতভাবে, লুনোখোড-1 পৃথিবীর পৃষ্ঠ থেকে উৎক্ষেপণ করা প্রথম চন্দ্র রোভার নয়। চাঁদে যাওয়ার পথটি ছিল দীর্ঘ এবং কঠিন। ট্রায়াল এবং ত্রুটির মাধ্যমে, সোভিয়েত বিজ্ঞানীরা মহাকাশে যাওয়ার পথ তৈরি করেছিলেন। প্রকৃতপক্ষে, অগ্রগামীদের জন্য এটা সবসময় কঠিন! সিওলকোভস্কি একটি "চন্দ্রবাহী গাড়ি" এর স্বপ্নও দেখেছিলেন যা চাঁদে নিজেরাই চলে যাবে এবং আবিষ্কার করবে। পানিতে তাকালেন মহা বিজ্ঞানী! - 19 ফেব্রুয়ারী, 1969-এ, প্রোটন লঞ্চ যান, যা এখনও কক্ষপথে প্রবেশের জন্য প্রয়োজনীয় প্রথম মহাজাগতিক গতি পেতে ব্যবহৃত হয়, একটি আন্তঃগ্রহ স্টেশনকে বাইরের মহাকাশে পাঠানোর জন্য চালু করা হয়েছিল। কিন্তু ত্বরণের সময়, চন্দ্র রোভারকে ঢেকে রাখা হেড ফেয়ারিং ঘর্ষণ এবং উচ্চ তাপমাত্রার প্রভাবে ভেঙে পড়তে শুরু করে - ধ্বংসাবশেষ জ্বালানী ট্যাঙ্কে পড়েছিল, যার ফলে একটি বিস্ফোরণ ঘটে এবং অনন্য রোভারের সম্পূর্ণ ধ্বংস হয়। এই প্রকল্পটিকে "লুনোখোদ-0" বলা হয়।
"কোরোলেভস্কি" চন্দ্র রোভার
কিন্তু লুনোখোদ-০ও প্রথম ছিল না। রেডিও-নিয়ন্ত্রিত গাড়ির মতো চাঁদে চলার কথা ছিল ডিভাইসটির নকশা, 1960 এর দশকের গোড়ার দিকে শুরু হয়েছিল। মার্কিন যুক্তরাষ্ট্রের সাথে মহাকাশ প্রতিযোগিতা, যা 1957 সালে শুরু হয়েছিল, সোভিয়েত বিজ্ঞানীদের জটিল প্রকল্পগুলিতে সাহসী কাজ করতে উদ্বুদ্ধ করেছিল। প্ল্যানেটারি রোভার প্রোগ্রামটি সবচেয়ে প্রামাণিক ডিজাইন ব্যুরো দ্বারা নেওয়া হয়েছিল - সের্গেই পাভলোভিচ কোরোলেভের ডিজাইন ব্যুরো। তারপরে, তারা এখনও জানতেন না চাঁদের পৃষ্ঠটি কেমন ছিল: এটি কি শক্ত ছিল নাকি শতাব্দী-প্রাচীন ধুলোর স্তর দিয়ে আবৃত ছিল? অর্থাৎ, প্রথমে আন্দোলনের পদ্ধতিটি নিজেই ডিজাইন করা প্রয়োজন ছিল এবং শুধুমাত্র তারপরে সরাসরি যন্ত্রপাতিতে যান। অনেক খোঁজাখুঁজির পর, আমরা একটি শক্ত পৃষ্ঠের উপর ফোকাস করার এবং চন্দ্র যানের চ্যাসিসকে ট্র্যাক করার সিদ্ধান্ত নিয়েছি। এটি VNII-100 (পরে VNII ট্রান্সম্যাশ) দ্বারা করা হয়েছিল, যা ট্যাঙ্ক চ্যাসিস তৈরিতে বিশেষীকরণ করেছিল - প্রকল্পটির নেতৃত্বে ছিলেন আলেকজান্ডার লিওনোভিচ কেমুর্দজিয়ান। "কোরোলেভস্কি" (যেমনটি পরে বলা হয়েছিল) চন্দ্র রোভারটি তার চেহারাতে ট্র্যাকের উপর একটি চকচকে ধাতব কচ্ছপের অনুরূপ - একটি গোলার্ধের আকারে একটি "শেল" এবং নীচে শনির বলয়ের মতো সোজা ধাতব ক্ষেত্র রয়েছে। এই চন্দ্র রোভারের দিকে তাকালে কিছুটা দুঃখ হয় যে এটির উদ্দেশ্য পূরণের ভাগ্যে ছিল না।
বিশ্ব বিখ্যাত চন্দ্র রোভার বাবাকিন
1965 সালে, মনুষ্য চান্দ্র প্রোগ্রামের চরম কাজের চাপের কারণে, সের্গেই পাভলোভিচ স্বয়ংক্রিয় চন্দ্র প্রোগ্রামটি জর্জি নিকোলাভিচ বাবাকিনের কাছে হস্তান্তর করেছিলেন খিমকি মেশিন-বিল্ডিং প্ল্যান্টের ডিজাইন ব্যুরোতে যার নাম S.A. লাভোচকিনা। করোলেভ ভারাক্রান্ত হৃদয় নিয়ে এই সিদ্ধান্ত নিয়েছিলেন। তিনি তার ব্যবসায় প্রথম হতে অভ্যস্ত ছিলেন, কিন্তু এমনকি তার প্রতিভা একা একা বিপুল পরিমাণ কাজের সাথে মানিয়ে নিতে পারেনি, তাই কাজটি ভাগ করে নেওয়াই বুদ্ধিমানের কাজ ছিল। এটি লক্ষ করা উচিত যে বাবাকিন দুর্দান্তভাবে কাজটি মোকাবেলা করেছেন! এটি আংশিকভাবে তার সুবিধার জন্য ছিল যে 1966 সালে, স্বয়ংক্রিয় আন্তঃগ্রহীয় স্টেশন লুনা-9 সেলেনায় একটি নরম অবতরণ করেছিল এবং সোভিয়েত বিজ্ঞানীরা অবশেষে পৃথিবীর প্রাকৃতিক উপগ্রহের পৃষ্ঠের একটি সঠিক ধারণা পেয়েছিলেন। এর পরে, চন্দ্র রোভার ডিজাইনে সামঞ্জস্য করা হয়েছিল, চেসিস পরিবর্তন করা হয়েছিল এবং পুরো চেহারাটি উল্লেখযোগ্য পরিবর্তন হয়েছিল। বাবাকিনের লুনোখোড সারা বিশ্ব থেকে বিস্মিত পর্যালোচনার সাথে দেখা করেছে - উভয় বিজ্ঞানী এবং সাধারণ মানুষের মধ্যে। বিশ্বের কমই কোনো মিডিয়া এই উজ্জ্বল আবিষ্কারকে উপেক্ষা করেছে। মনে হচ্ছে এখনও - সোভিয়েত ম্যাগাজিনের একটি ছবিতে - চন্দ্র রোভারটি আমাদের চোখের সামনে দাঁড়িয়ে আছে, অনেক জটিল অ্যান্টেনা সহ চাকার উপর একটি বড় প্যানের আকারে একটি স্মার্ট রোবটের মতো।
কিন্তু সে কেমন?
চন্দ্র রোভারের আকার একটি আধুনিক যাত্রীবাহী গাড়ির সাথে তুলনীয়, তবে এখানেই মিল শেষ হয় এবং পার্থক্য শুরু হয়। চন্দ্র রোভারের আটটি চাকা রয়েছে এবং তাদের প্রত্যেকটির নিজস্ব ড্রাইভ রয়েছে, যা ডিভাইসটিকে সর্ব-ভূখণ্ডের গুণাবলী প্রদান করে। লুনোখোড দুটি গতিতে এগিয়ে এবং পিছনে যেতে পারে এবং চলার সময় জায়গায় বাঁক নিতে পারে। যন্ত্রের বগিতে ("প্যান"-এ) অন-বোর্ড সিস্টেমের যন্ত্রপাতি রাখা ছিল। সোলার প্যানেল দিনের বেলা পিয়ানোর ঢাকনার মতো খোলা হয় এবং রাতে বন্ধ হয়ে যায়। এটি সমস্ত সিস্টেমের জন্য রিচার্জিং প্রদান করে। একটি রেডিওআইসোটোপ তাপ উত্স (তেজস্ক্রিয় ক্ষয় ব্যবহার করে) অন্ধকারে সরঞ্জামগুলিকে উত্তপ্ত করে, যখন তাপমাত্রা +120 ডিগ্রি থেকে -170 এ নেমে যায়। যাইহোক, 1 চন্দ্র দিন 24 পার্থিব দিনের সমান। লুনোখডের উদ্দেশ্য ছিল চন্দ্রের মাটির রাসায়নিক গঠন এবং বৈশিষ্ট্য, সেইসাথে তেজস্ক্রিয় এবং এক্স-রে মহাজাগতিক বিকিরণ অধ্যয়ন করা। ডিভাইসটিতে দুটি টেলিভিশন ক্যামেরা (একটি ব্যাকআপ), চারটি টেলিফটোমিটার, এক্স-রে এবং রেডিয়েশন পরিমাপ যন্ত্র, একটি অত্যন্ত দিকনির্দেশক অ্যান্টেনা (পরে আলোচনা করা হয়েছে) এবং অন্যান্য ধূর্ত যন্ত্রপাতি ছিল।
"লুনোখোদ-1", বা একটি অ-শিশুদের রেডিও-নিয়ন্ত্রিত খেলনা
আমরা বিশদে যাব না - এটি একটি পৃথক নিবন্ধের জন্য একটি বিষয় - তবে কোনও না কোনও উপায়ে, লুনোখড 1 সেলিনে শেষ হয়েছে৷ একটি স্বয়ংক্রিয় স্টেশন তাকে সেখানে নিয়ে গিয়েছিল, অর্থাৎ সেখানে কোনও লোক ছিল না এবং চন্দ্র যন্ত্রটিকে পৃথিবী থেকে নিয়ন্ত্রণ করতে হয়েছিল। প্রতিটি ক্রু পাঁচ জন নিয়ে গঠিত: কমান্ডার, ড্রাইভার, ফ্লাইট ইঞ্জিনিয়ার, ন্যাভিগেটর এবং অত্যন্ত দিকনির্দেশক অ্যান্টেনা অপারেটর। পরেরটি নিশ্চিত করতে হবে যে অ্যান্টেনা সর্বদা পৃথিবীর দিকে "দেখবে", চন্দ্র রোভারের সাথে রেডিও যোগাযোগ সরবরাহ করে। পৃথিবী এবং চাঁদের মধ্যে আনুমানিক 400,000 কিমি দূরত্ব রয়েছে এবং রেডিও সংকেত, যার সাহায্যে ডিভাইসের গতিবিধি সংশোধন করা সম্ভব হয়েছিল, এই দূরত্বটি 1.5 সেকেন্ডে অতিক্রম করেছিল এবং চাঁদ থেকে ছবিটি তৈরি হয়েছিল - ভূদৃশ্যের উপর নির্ভর করে - 3 থেকে 20 সেকেন্ড পর্যন্ত। সুতরাং দেখা গেল যে চিত্রটি তৈরি হওয়ার সময়, চন্দ্র রোভারটি চলতে থাকে এবং চিত্রটি উপস্থিত হওয়ার পরে, ক্রুরা তাদের গাড়িটি ইতিমধ্যেই গর্তের মধ্যে সনাক্ত করতে পারে। প্রচণ্ড উত্তেজনার কারণে প্রতি দুই ঘণ্টা পর পর ক্রুরা একে অপরকে প্রতিস্থাপন করে।
এইভাবে, লুনোখোড-1, 3 পার্থিব মাসের অপারেশনের জন্য ডিজাইন করা হয়েছে, চাঁদে 301 দিন কাজ করেছে। এই সময়ে, তিনি 10,540 মিটার ভ্রমণ করেছেন, 80,000 বর্গ মিটার পরীক্ষা করেছেন, অনেক ফটোগ্রাফ এবং প্যানোরামা প্রেরণ করেছেন এবং আরও অনেক কিছু। ফলস্বরূপ, রেডিওআইসোটোপ তাপ উত্স তার সংস্থান নিঃশেষ করে দেয় এবং চন্দ্র রোভার "হিমায়িত" হয়।
"লুনোখোদ-২"
লুনোখোড-১-এর সাফল্য নতুন মহাকাশ কর্মসূচি লুনোখড-২ বাস্তবায়নে অনুপ্রাণিত করেছে। নতুন প্রকল্পটি তার পূর্বসূরীর থেকে চেহারায় প্রায় আলাদা ছিল না, তবে উন্নত করা হয়েছিল এবং 15 জানুয়ারী, 1973 সালে, লুনা-21 মহাকাশযান এটি সেলেনাকে সরবরাহ করে। দুর্ভাগ্যবশত, চন্দ্র রোভারটি মাত্র 4 পার্থিব মাস স্থায়ী হয়েছিল, কিন্তু এই সময়ে এটি 42 কিমি ভ্রমণ করতে এবং শত শত পরিমাপ এবং পরীক্ষা পরিচালনা করতে সক্ষম হয়েছিল।
আসুন ক্রু ড্রাইভার, ব্যায়াচেস্লাভ জর্জিভিচ ডভগানকে মেঝে দেওয়া যাক: “দ্বিতীয়টির সাথে গল্পটি বোকা হয়ে উঠল। তিনি ইতিমধ্যে চার মাস ধরে পৃথিবীর উপগ্রহে ছিলেন। 9 মে আমি হাল ধরেছিলাম। আমরা একটি গর্তের মধ্যে অবতরণ করেছি, নেভিগেশন সিস্টেম ব্যর্থ হয়েছে। কিভাবে বের হবে? আমরা একাধিকবার একই পরিস্থিতিতে নিজেদের খুঁজে পেয়েছি। তারপর তারা সহজভাবে সোলার প্যানেল ঢেকে বেরিয়ে গেল। এবং তারপর তারা আমাদের এটি বন্ধ না করতে এবং বের হওয়ার নির্দেশ দেয়। তারা বলে, আমরা এটি বন্ধ করে দিয়েছি, এবং চন্দ্র রোভার থেকে তাপ পাম্প করা হবে না, যন্ত্রগুলি অতিরিক্ত গরম হবে। আমরা তাড়িয়ে চান্দ্রের মাটিতে আঘাত করার চেষ্টা করেছি। এবং চন্দ্রের ধুলো এতই আঠালো... লুনোখোড প্রয়োজনীয় পরিমাণে সৌর শক্তি রিচার্জ করা বন্ধ করে দেয় এবং ধীরে ধীরে শক্তি হারিয়ে ফেলে। 11 মে, লুনোখোড থেকে আর কোনও সংকেত ছিল না।"
"লুনোখোদ-3"
দুর্ভাগ্যবশত, লুনোখোড-২ এবং আরেকটি অভিযান, লুনা-২৪-এর বিজয়ের পরে, চাঁদকে দীর্ঘ সময়ের জন্য ভুলে গিয়েছিল। সমস্যাটি ছিল যে তার গবেষণা, দুর্ভাগ্যবশত, বৈজ্ঞানিক নয়, রাজনৈতিক আকাঙ্ক্ষা দ্বারা প্রাধান্য পেয়েছিল। তবে নতুন অনন্য স্ব-চালিত যান "লুনোখোড -3" লঞ্চের প্রস্তুতি ইতিমধ্যেই সম্পন্ন হয়েছে, এবং আগের অভিযানে অমূল্য অভিজ্ঞতা অর্জনকারী ক্রুরা এটিকে চন্দ্রের গর্তের মধ্যে চালানোর জন্য প্রস্তুতি নিচ্ছিল। এই মেশিনটি, যা তার পূর্বসূরিদের সমস্ত সেরা গুণাবলী শোষণ করেছিল, সেই বছরগুলিতে সবচেয়ে উন্নত প্রযুক্তিগত সরঞ্জাম এবং সর্বশেষ বৈজ্ঞানিক যন্ত্রপাতি ছিল। একটি ঘূর্ণায়মান স্টেরিও ক্যামেরার দাম কত ছিল, যার পছন্দগুলি এখন 3D বলা ফ্যাশনেবল। এখন "লুনোখোদ-3" শুধুমাত্র S.A-এর নামে NPO-এর জাদুঘরের একটি প্রদর্শনী। লাভোচকিনা। অন্যায় ভাগ্য!
লুনোখোড -1 গ্রিগরি নিকোলাভিচ বাবাকিনের নেতৃত্বে এসএ লাভোচকিনের নামে নামকরণ করা খিমকি মেশিন-বিল্ডিং প্ল্যান্টের ডিজাইন ব্যুরোতে তৈরি করা হয়েছিল। লুনোখোডের জন্য স্ব-চালিত চ্যাসিস আলেকজান্ডার লিওনোভিচ কেমুর্দজিয়ানের নেতৃত্বে ভিএনআইআইট্রান্সম্যাশে তৈরি করা হয়েছিল।
চন্দ্র রোভারের প্রাথমিক নকশা 1966 সালের শরত্কালে অনুমোদিত হয়েছিল। 1967 সালের শেষের দিকে, সমস্ত নকশা ডকুমেন্টেশন প্রস্তুত ছিল।
Lunokhod-1 সহ স্বয়ংক্রিয় আন্তঃগ্রহ স্টেশন লুনা-17 10 নভেম্বর, 1970 সালে চালু হয়েছিল এবং 15 নভেম্বর, লুনা-17 চাঁদের একটি কৃত্রিম উপগ্রহের কক্ষপথে প্রবেশ করেছিল।
17 নভেম্বর, 1970 তারিখে, স্টেশনটি নিরাপদে বৃষ্টির সাগরে অবতরণ করে এবং লুনোখোড-1 চন্দ্রের মাটিতে পড়ে যায়।
মিনস্ক-22 - STI-90-এর উপর ভিত্তি করে টেলিমেট্রিক তথ্য পর্যবেক্ষণ ও প্রক্রিয়াকরণের জন্য একটি জটিল সরঞ্জাম ব্যবহার করে গবেষণা যন্ত্রটি নিয়ন্ত্রণ করা হয়েছিল। সিম্ফেরোপল স্পেস কমিউনিকেশন সেন্টারের লুনোখড কন্ট্রোল সেন্টারে একটি লুনোখড কন্ট্রোল সেন্টার অন্তর্ভুক্ত ছিল, যেটিতে ক্রু কমান্ডার, লুনোখড ড্রাইভার এবং অত্যন্ত দিকনির্দেশক অ্যান্টেনা অপারেটর, ক্রু নেভিগেটরদের জন্য একটি ওয়ার্কস্টেশন, সেইসাথে অপারেশনালের জন্য একটি কক্ষ রয়েছে। টেলিমেট্রিক তথ্য প্রক্রিয়াকরণ। চন্দ্র রোভার নিয়ন্ত্রণে প্রধান অসুবিধা ছিল সময় বিলম্ব, রেডিও সিগন্যাল চাঁদে এবং পিছনে ভ্রমণ করতে প্রায় 2 সেকেন্ড সময় নেয় এবং 4 সেকেন্ডে 1 ফ্রেমের ফ্রিকোয়েন্সি থেকে 20-এর মধ্যে 1-এ ছবি পরিবর্তনের ফ্রিকোয়েন্সি সহ লো-ফ্রেমের টেলিভিশন ব্যবহার। সেকেন্ড ফলস্বরূপ, নিয়ন্ত্রণে মোট বিলম্ব 24 সেকেন্ডে পৌঁছেছে।
পরিকল্পিত কাজের প্রথম তিন মাসের সময়, পৃষ্ঠ অধ্যয়ন করার পাশাপাশি, ডিভাইসটি একটি অ্যাপ্লিকেশন প্রোগ্রামও চালিয়েছিল, যার সময় এটি চন্দ্র কেবিনের জন্য অবতরণ এলাকা অনুসন্ধানে কাজ করেছিল। প্রোগ্রামটি শেষ করার পরে, চন্দ্র রোভার চাঁদে তার মূল গণনাকৃত সংস্থানের চেয়ে তিনগুণ বেশি সময় ধরে কাজ করেছিল। চন্দ্রপৃষ্ঠে অবস্থানের সময়, লুনোখড-১ 10,540 মিটার ভ্রমণ করেছে, 211টি চন্দ্রের প্যানোরামা এবং 25 হাজার ফটোগ্রাফ পৃথিবীতে প্রেরণ করেছে। মাটির পৃষ্ঠ স্তরের ভৌত এবং যান্ত্রিক বৈশিষ্ট্যগুলি রুট বরাবর 500 টিরও বেশি পয়েন্টে অধ্যয়ন করা হয়েছিল এবং এর রাসায়নিক গঠন 25 পয়েন্টে বিশ্লেষণ করা হয়েছিল।
15 সেপ্টেম্বর, 1971 সালে, চন্দ্র রোভারের সিল করা পাত্রের ভিতরের তাপমাত্রা আইসোটোপ তাপ উৎসের সংস্থান নিঃশেষ হয়ে যাওয়ায় কমতে শুরু করে। 30 সেপ্টেম্বর, ডিভাইসটি যোগাযোগ করেনি এবং 4 অক্টোবর, এটির সাথে যোগাযোগ করার সমস্ত প্রচেষ্টা বন্ধ করে দেওয়া হয়েছিল।
11 ডিসেম্বর, 1993-এ, লুনোখড-1, লুনা-17 স্টেশনের অবতরণ পর্যায়ে, সোথেবি'স-এ লাভোচকিন অ্যাসোসিয়েশন নিলামের জন্য তুলেছিল। $5,000 এর একটি বিবৃত প্রারম্ভিক মূল্য সহ, নিলাম $68,500 এ শেষ হয়েছিল। রাশিয়ান প্রেসের মতে, ক্রেতা আমেরিকান মহাকাশচারীদের একজনের ছেলে বলে প্রমাণিত হয়েছিল। ক্যাটালগটি বলেছে যে লটটি "চাঁদের পৃষ্ঠে বিশ্রাম নিয়েছে।"
রোভারের ভর ছিল 756 কেজি, খোলা সৌর ব্যাটারি সহ দৈর্ঘ্য ছিল 4.42 মিটার, প্রস্থ ছিল 2.15 মিটার এবং উচ্চতা ছিল 1.92 মিটার। চাকার ব্যাস — 510 মিমি, প্রস্থ — 200 মিমি, হুইলবেস — 1700 মিমি, ট্র্যাক প্রস্থ — 1600 মিমি।
17 নভেম্বর, 1970, স্টেশনটি নিরাপদে বৃষ্টির সাগরে অবতরণ করে। এবং লুনোখোড-1 চন্দ্রের মাটিতে পিছলে গেছে। পরিকল্পিত কাজের প্রথম তিন মাসের সময়, পৃষ্ঠ অধ্যয়ন করার পাশাপাশি, ডিভাইসটি একটি অ্যাপ্লিকেশন প্রোগ্রামও চালিয়েছিল, যার সময় এটি চন্দ্র কেবিনের জন্য অবতরণ এলাকা অনুসন্ধানে কাজ করেছিল। প্রোগ্রামটি শেষ করার পরে, চন্দ্র রোভারটি তার মূল গণনাকৃত সংস্থানের চেয়ে তিনগুণ বেশি সময় চাঁদে কাজ করেছিল। চাঁদের পৃষ্ঠে অবস্থানের সময়, লুনোখোড-1 10,540 মিটার ভ্রমণ করেছে, 80,000 m2 এলাকা জরিপ করেছে এবং 211টি চন্দ্র প্যানোরামা এবং 25 হাজার ফটোগ্রাফ পৃথিবীতে প্রেরণ করেছে। সর্বোচ্চ গতি ছিল 2 কিমি/ঘন্টা। লুনোখোডের সক্রিয় অস্তিত্বের মোট সময়কাল ছিল 301 দিন 06 ঘন্টা 37 মিনিট। পৃথিবীর সাথে 157টি সেশনের সময়, 24,820টি রেডিও কমান্ড জারি করা হয়েছিল। ব্যাপ্তিযোগ্যতা মূল্যায়ন ডিভাইসটি চন্দ্রের মাটির পৃষ্ঠ স্তরের ভৌত ও যান্ত্রিক বৈশিষ্ট্য নির্ধারণের 537টি চক্র সম্পন্ন করেছে এবং এর রাসায়নিক বিশ্লেষণ 25 পয়েন্টে করা হয়েছে।
15 সেপ্টেম্বর, 1971 সালে, চন্দ্র রোভারের সিল করা পাত্রের ভিতরের তাপমাত্রা আইসোটোপ তাপ উৎসের সংস্থান নিঃশেষ হয়ে যাওয়ায় কমতে শুরু করে। 30 সেপ্টেম্বর, ডিভাইসটি যোগাযোগ করেনি এবং 4 অক্টোবর, এটির সাথে যোগাযোগ করার সমস্ত প্রচেষ্টা বন্ধ করে দেওয়া হয়েছিল।
লুনোখোড 1-এ একটি কোণার প্রতিফলক ইনস্টল করা হয়েছিল। যার সাহায্যে চাঁদের দূরত্ব নির্ভুলভাবে নির্ণয় করার জন্য পরীক্ষা-নিরীক্ষা করা হয়েছিল। Lunokhod-1 প্রতিফলক অপারেশনের প্রথম দেড় বছরে প্রায় 20 টি পর্যবেক্ষণ প্রদান করেছিল, কিন্তু তারপরে এর সঠিক অবস্থান হারিয়ে গিয়েছিল। মার্চ 2010 সালে, লুনোখোড 1 এলআরও চিত্রের গবেষকরা আবিষ্কার করেছিলেন। 22শে এপ্রিল, 2010-এ, টম মারফির নেতৃত্বে সান দিয়েগোর ক্যালিফোর্নিয়া বিশ্ববিদ্যালয়ের একদল আমেরিকান বিজ্ঞানী রিপোর্ট করেন যে তারা 1971 সালের পর প্রথমবারের মতো লুনোখোড 1 এর প্রতিফলক থেকে একটি লেজার রশ্মির প্রতিফলন পেতে সক্ষম হয়েছেন। . চাঁদের পৃষ্ঠে লুনোখোড-১ এর অবস্থান: অক্ষাংশ. 38.31870°, দ্রাঘিমাংশ. −৩৫.০০৩৭৪°।
লুনোখোদ- ১- পৃথিবীর প্রথম প্ল্যানেটারি রোভার যা সফলভাবে অন্য মহাকাশীয় বস্তু - চাঁদের পৃষ্ঠে কাজ করে।
চন্দ্র অন্বেষণের জন্য সোভিয়েত রিমোট-নিয়ন্ত্রিত স্ব-চালিত যানবাহন "লুনোখোদ" সিরিজের অন্তর্গত, এগারো চন্দ্র দিন ধরে চাঁদে কাজ করেছে। এটি চন্দ্র পৃষ্ঠের বৈশিষ্ট্য, চাঁদে তেজস্ক্রিয় এবং এক্স-রে মহাজাগতিক বিকিরণ, মাটির রাসায়নিক গঠন এবং বৈশিষ্ট্যগুলি অধ্যয়ন করার উদ্দেশ্যে ছিল।
এটি 17 নভেম্বর, 1970 সালে সোভিয়েত আন্তঃগ্রহীয় স্টেশন লুনা-17 দ্বারা চাঁদের পৃষ্ঠে পৌঁছে দেওয়া হয়েছিল এবং 14 সেপ্টেম্বর, 1971 পর্যন্ত এটির পৃষ্ঠে কাজ করেছিল।
- দুটি টেলিভিশন ক্যামেরা, চারটি প্যানোরামিক টেলিফটোমিটার;
- এক্স-রে ফ্লুরোসেন্স স্পেকট্রোমিটার RIFMA;
- এক্স-রে টেলিস্কোপ RT-1;
- ওডোমিটার এবং পেনেট্রোমিটার পিআরওপি;
- রেডিয়েশন ডিটেক্টর RV-2N;
- লেজার প্রতিফলক TL.
লুনোখোড 1 হারিয়ে যাওয়ার বিষয়টি চাঁদের লেজার অনুসন্ধানের আরেকটি পরীক্ষার সময় জানা যায়। নাসার জেট প্রপালশন ল্যাবরেটরির কর্মচারী ভ্লাদিস্লাভ তুরিশেভ এই তথ্য জানিয়েছেন।
এই ধরনের পরীক্ষা-নিরীক্ষার উদ্দেশ্য হল আমাদের প্রাকৃতিক উপগ্রহের দূরত্ব নির্ধারণ করা, যা ধীরে ধীরে দূরে সরে যাচ্ছে - প্রতি বছর প্রায় 38 মিলিমিটার। এটি করার জন্য, একটি শক্তিশালী লেজার রশ্মি পৃথিবী থেকে চাঁদের দিকে পরিচালিত হয়, প্রতিফলিত মরীচিটি ধরা হয় এবং পিছনে এবং পিছনে ভ্রমণে ব্যয় করা সময় রেকর্ড করা হয়। এবং, এর গতি জেনে, তারা দূরত্ব গণনা করে।
মরীচিটি তথাকথিত কোণার প্রতিফলকের দিকে নির্দেশিত হয় - এক ধরণের খোলা বাক্স যার তিনটি আয়না একে অপরের সাথে লম্বভাবে মাউন্ট করা হয়। যে কোনো মরীচি যা আয়নাকে আঘাত করে তা ঠিক সেই বিন্দুতে প্রতিফলিত হয় যেখান থেকে এটি প্রকাশিত হয়েছিল।
Lunokhod-1 একটি কর্নার রিফ্লেক্টর দিয়ে সজ্জিত ছিল। সুতরাং, আমেরিকানরা তাকে একটি মরীচি লক্ষ্য. কিন্তু কিছুই প্রতিফলিত হয়নি। আমরা মরীচি দিয়ে পৃষ্ঠ অনুসন্ধান করেছি - আবার কিছুই নেই। নাসা লোকসানে আছে। ডিভাইসটি অদৃশ্য হয়ে গেছে বলে মনে হচ্ছে। কিন্তু এর স্থানাঙ্কগুলি সুনির্দিষ্টভাবে পরিচিত; এটা মিস করা কঠিন.
সোভিয়েত লুনোখড প্রমাণ করে যে আমেরিকানরা চাঁদে ছিল
সোভিয়েত সোভিয়েত লুনোখড দেখতে একটি ক্ষুদ্র কালো দাগের মতো সরঞ্জাম যা সোভিয়েত যুগে আমাদের প্রাকৃতিক উপগ্রহে রেখে যাওয়া আবিষ্কৃত হয়েছে।
NASA বিশেষজ্ঞরা স্বয়ংক্রিয় প্রোব লুনার রিকনেসেন্স অরবিটার দ্বারা তোলা ফটোগ্রাফের একটি নতুন বিশাল অ্যারের অ্যাক্সেস খুলেছে - এটি এখন চাঁদের কক্ষপথে রয়েছে।
এক লাখেরও বেশি আলোকচিত্র রয়েছে। পূর্ববর্তীগুলিতে, মাত্র 50 কিলোমিটার উচ্চতা থেকে নেওয়া, উত্সাহীরা প্রায় সমস্ত আমেরিকান অভিযানের অবতরণ মডিউলগুলি খুঁজে পেয়েছিল। প্রথম থেকে, Apollo 11, 1969 সালে, শেষ পর্যন্ত, Apollo 17।
এখন, এলআরওর ফটোগ্রাফগুলিতে, তারা ইউএসএসআর-এর রেখে যাওয়া সরঞ্জামগুলি খুঁজছে - লুনার রোভার এবং লুনা সিরিজের স্বয়ংক্রিয় স্টেশন। এবং তারা এটি খুঁজে পায়।
অন্য দিন, ইউনিভার্সিটি অফ ওয়েস্টার্ন অন্টারিও থেকে কানাডিয়ান গবেষক ফিল স্ট্যাক রিপোর্ট করেছেন যে তিনি হারিয়ে যাওয়া সোভিয়েত লুনোখোড আবিষ্কার করেছেন। কি একটি বাস্তব সংবেদন মত লাগছিল.
আমাদের লুনোখোদ-১ সত্যিই অদৃশ্য হয়ে গেল। 1970 সালে, এটি স্বয়ংক্রিয় স্টেশন লুনা -17 দ্বারা বিতরণ করা হয়েছিল। পৃথিবী থেকে প্রেরিত লেজারের স্পন্দন প্রতিফলিত করার জন্য সফল পরীক্ষার একটি সিরিজের পরে, স্ব-চালিত যানটি অদৃশ্য হয়ে গেছে বলে মনে হচ্ছে। অর্থাৎ সী অফ রেইনস অঞ্চলে তিনি যে জায়গায় থামলেন তা নিশ্চিতভাবে জানা যায়। কিন্তু সেখান থেকে কোনো উত্তর নেই।
কিছু কারণে, আমেরিকানরা একটি লেজার রশ্মি দিয়ে ক্রমাগতভাবে চাঁদের পৃষ্ঠ অনুসন্ধান করে লুনোখোড-1 খুঁজে বের করার চেষ্টা করছে। এবং তাদের জন্য মিস করা কঠিন - স্পট এলাকা 25 বর্গ কিলোমিটারে পৌঁছেছে। তারা কিছুই খুঁজে পায় না।
এবং কানাডিয়ান, যেমনটি দেখা গেছে, প্রথমটি নয়, দ্বিতীয় ডিভাইসটি আবিষ্কার করেছে - লুনোখোড -2। কিন্তু কোথাও হারিয়ে যাননি, তিনি দাঁড়িয়েছেন স্বচ্ছতার সাগরে। এর প্রতিফলক এখনও কার্যকরী।
অপ্রত্যাশিত নিশ্চিতকরণ
লুনোখড 2 লুনা 21 স্টেশনের সাথে 1973 সালে পৌঁছেছিল। তিনি অ্যাপোলো 17 থেকে প্রায় 150 কিলোমিটার অবতরণ করেছিলেন। এবং কিংবদন্তিগুলির মধ্যে একটি অনুসারে, ডিভাইসটি সেই সাইটে গিয়েছিল যেখানে আমেরিকানরা 1972 সালে পরিচালিত হয়েছিল এবং তাদের স্ব-চালিত গাড়ি চালনা করেছিল।
মনে হচ্ছে লুনোখোড-২, একটি ক্যামেরা দিয়ে সজ্জিত, মহাকাশচারীদের রেখে যাওয়া সরঞ্জামগুলি ফিল্ম করার কথা ছিল৷ এবং নিশ্চিত করুন যে তারা সত্যিই সেখানে ছিল। ইউএসএসআর এখনও সন্দেহ ছিল, যদিও তারা আনুষ্ঠানিকভাবে এটি স্বীকার করেনি।
আমাদের স্ব-চালিত যান 37 কিলোমিটার ভ্রমণ করেছে - এটি অন্যান্য মহাকাশীয় বস্তুগুলিতে চলাচলের জন্য একটি রেকর্ড। তিনি সত্যিই অ্যাপোলো 17-এ পৌঁছাতে পারতেন, কিন্তু তিনি ক্রেটার রিম থেকে আলগা মাটি ধরেছিলেন এবং অতিরিক্ত উত্তপ্ত হয়েছিলেন।
ছবিতে, লুনোখড 2 একটি ছোট অন্ধকার দাগের মতো দেখাচ্ছে। এবং যদি চাকার ট্র্যাকগুলির জন্য না হয়, তাহলে সম্ভবত ডিভাইসটি খুঁজে পাওয়া অসম্ভব ছিল। এমনকি স্থানাঙ্ক জেনেও।
Apollo 17 অভিযানের স্ব-চালিত যানটি ঠিক ততটাই অস্পষ্ট দেখায়। যদিও এটি আকারে বড়। সাদৃশ্য - ফটোগ্রাফে - উভয় ইউনিটের, সম্ভবত, ইঙ্গিত করে: উভয়ই চাঁদে রয়েছে। আমাদের, নিশ্চিত. এ নিয়ে কেউ কখনো সন্দেহ করেনি। কিন্তু আমেরিকানরা মিথ্যা বলে সন্দেহ করেছিল। দৃশ্যত, নিরর্থক। তারা চাঁদে ছিল। অন্তত 1972 সালে।
সূত্র: savok.name, dic.academic.ru, selena-luna.ru, www.kp.ru, newsland.com
17 নভেম্বর, 1970-এ, লুনা-17 স্বয়ংক্রিয় স্টেশন পৃথিবীর প্রথম গ্রহের রোভার, লুনোখোড-1, চাঁদের পৃষ্ঠে পৌঁছে দেয়। ইউএসএসআর বিজ্ঞানীরা সফলভাবে এই প্রোগ্রামটি বাস্তবায়ন করেছে এবং শুধুমাত্র মার্কিন যুক্তরাষ্ট্রের সাথে প্রতিযোগিতায় নয়, মহাবিশ্বের অধ্যয়নেও আরেকটি পদক্ষেপ নিয়েছে।
"লুনোখোদ-০"
অদ্ভুতভাবে, লুনোখোড-1 পৃথিবীর পৃষ্ঠ থেকে উৎক্ষেপণ করা প্রথম চন্দ্র রোভার নয়। চাঁদে যাওয়ার পথটি ছিল দীর্ঘ এবং কঠিন। ট্রায়াল এবং ত্রুটির মাধ্যমে, সোভিয়েত বিজ্ঞানীরা মহাকাশে যাওয়ার পথ তৈরি করেছিলেন। প্রকৃতপক্ষে, অগ্রগামীদের জন্য এটা সবসময় কঠিন! সিওলকোভস্কি একটি "চন্দ্রবাহী গাড়ি" এর স্বপ্নও দেখেছিলেন যা চাঁদে নিজেরাই চলে যাবে এবং আবিষ্কার করবে। পানিতে তাকালেন মহা বিজ্ঞানী! - 19 ফেব্রুয়ারী, 1969-এ, প্রোটন লঞ্চ যান, যা এখনও কক্ষপথে প্রবেশের জন্য প্রয়োজনীয় প্রথম মহাজাগতিক গতি পেতে ব্যবহৃত হয়, একটি আন্তঃগ্রহ স্টেশনকে বাইরের মহাকাশে পাঠানোর জন্য চালু করা হয়েছিল। কিন্তু ত্বরণের সময়, চন্দ্র রোভারকে ঢেকে রাখা হেড ফেয়ারিং ঘর্ষণ এবং উচ্চ তাপমাত্রার প্রভাবে ভেঙে পড়তে শুরু করে - ধ্বংসাবশেষ জ্বালানী ট্যাঙ্কে পড়েছিল, যার ফলে একটি বিস্ফোরণ ঘটে এবং অনন্য রোভারের সম্পূর্ণ ধ্বংস হয়। এই প্রকল্পটিকে "লুনোখোদ-0" বলা হয়।
"কোরোলেভস্কি" চন্দ্র রোভার
কিন্তু লুনোখোদ-০ও প্রথম ছিল না। রেডিও-নিয়ন্ত্রিত গাড়ির মতো চাঁদে চলার কথা ছিল ডিভাইসটির নকশা, 1960 এর দশকের গোড়ার দিকে শুরু হয়েছিল। মার্কিন যুক্তরাষ্ট্রের সাথে মহাকাশ প্রতিযোগিতা, যা 1957 সালে শুরু হয়েছিল, সোভিয়েত বিজ্ঞানীদের জটিল প্রকল্পগুলিতে সাহসী কাজ করতে উদ্বুদ্ধ করেছিল। প্ল্যানেটারি রোভার প্রোগ্রামটি সবচেয়ে প্রামাণিক ডিজাইন ব্যুরো দ্বারা নেওয়া হয়েছিল - সের্গেই পাভলোভিচ কোরোলেভের ডিজাইন ব্যুরো। তারপরে, তারা এখনও জানতেন না চাঁদের পৃষ্ঠটি কেমন ছিল: এটি কি শক্ত ছিল নাকি শতাব্দী-প্রাচীন ধুলোর স্তর দিয়ে আবৃত ছিল? অর্থাৎ, প্রথমে আন্দোলনের পদ্ধতিটি নিজেই ডিজাইন করা প্রয়োজন ছিল এবং শুধুমাত্র তারপরে সরাসরি যন্ত্রপাতিতে যান। অনেক খোঁজাখুঁজির পর, আমরা একটি শক্ত পৃষ্ঠের উপর ফোকাস করার এবং চন্দ্র যানের চ্যাসিসকে ট্র্যাক করার সিদ্ধান্ত নিয়েছি। এটি VNII-100 (পরে VNII ট্রান্সম্যাশ) দ্বারা করা হয়েছিল, যা ট্যাঙ্ক চ্যাসিস তৈরিতে বিশেষীকরণ করেছিল - প্রকল্পটির নেতৃত্বে ছিলেন আলেকজান্ডার লিওনোভিচ কেমুর্দজিয়ান। "কোরোলেভস্কি" (যেমনটি পরে বলা হয়েছিল) চন্দ্র রোভারটি তার চেহারাতে ট্র্যাকের উপর একটি চকচকে ধাতব কচ্ছপের অনুরূপ - একটি গোলার্ধের আকারে একটি "শেল" এবং নীচে শনির বলয়ের মতো সোজা ধাতব ক্ষেত্র রয়েছে। এই চন্দ্র রোভারের দিকে তাকালে কিছুটা দুঃখ হয় যে এটির উদ্দেশ্য পূরণের ভাগ্যে ছিল না।
বিশ্ব বিখ্যাত চন্দ্র রোভার বাবাকিন
1965 সালে, মনুষ্য চান্দ্র প্রোগ্রামের চরম কাজের চাপের কারণে, সের্গেই পাভলোভিচ স্বয়ংক্রিয় চন্দ্র প্রোগ্রামটি জর্জি নিকোলাভিচ বাবাকিনের কাছে হস্তান্তর করেছিলেন খিমকি মেশিন-বিল্ডিং প্ল্যান্টের ডিজাইন ব্যুরোতে যার নাম S.A. লাভোচকিনা। করোলেভ ভারাক্রান্ত হৃদয় নিয়ে এই সিদ্ধান্ত নিয়েছিলেন। তিনি তার ব্যবসায় প্রথম হতে অভ্যস্ত ছিলেন, কিন্তু এমনকি তার প্রতিভা একা একা বিপুল পরিমাণ কাজের সাথে মানিয়ে নিতে পারেনি, তাই কাজটি ভাগ করে নেওয়াই বুদ্ধিমানের কাজ ছিল। এটি লক্ষ করা উচিত যে বাবাকিন দুর্দান্তভাবে কাজটি মোকাবেলা করেছেন! এটি আংশিকভাবে তার সুবিধার জন্য ছিল যে 1966 সালে, স্বয়ংক্রিয় আন্তঃগ্রহীয় স্টেশন লুনা-9 সেলেনায় একটি নরম অবতরণ করেছিল এবং সোভিয়েত বিজ্ঞানীরা অবশেষে পৃথিবীর প্রাকৃতিক উপগ্রহের পৃষ্ঠের একটি সঠিক ধারণা পেয়েছিলেন। এর পরে, চন্দ্র রোভার ডিজাইনে সামঞ্জস্য করা হয়েছিল, চেসিস পরিবর্তন করা হয়েছিল এবং পুরো চেহারাটি উল্লেখযোগ্য পরিবর্তন হয়েছিল। বাবাকিনের লুনোখোড সারা বিশ্ব থেকে বিস্মিত পর্যালোচনার সাথে দেখা করেছে - উভয় বিজ্ঞানী এবং সাধারণ মানুষের মধ্যে। বিশ্বের কমই কোনো মিডিয়া এই উজ্জ্বল আবিষ্কারকে উপেক্ষা করেছে। মনে হচ্ছে এখনও - সোভিয়েত ম্যাগাজিনের একটি ছবিতে - চন্দ্র রোভারটি আমাদের চোখের সামনে দাঁড়িয়ে আছে, অনেক জটিল অ্যান্টেনা সহ চাকার উপর একটি বড় প্যানের আকারে একটি স্মার্ট রোবটের মতো।
কিন্তু সে কেমন?
চন্দ্র রোভারের আকার একটি আধুনিক যাত্রীবাহী গাড়ির সাথে তুলনীয়, তবে এখানেই মিল শেষ হয় এবং পার্থক্য শুরু হয়। চন্দ্র রোভারের আটটি চাকা রয়েছে এবং তাদের প্রত্যেকটির নিজস্ব ড্রাইভ রয়েছে, যা ডিভাইসটিকে সর্ব-ভূখণ্ডের গুণাবলী প্রদান করে। লুনোখোড দুটি গতিতে এগিয়ে এবং পিছনে যেতে পারে এবং চলার সময় জায়গায় বাঁক নিতে পারে। যন্ত্রের বগিতে ("প্যান"-এ) অন-বোর্ড সিস্টেমের যন্ত্রপাতি রাখা ছিল। সোলার প্যানেল দিনের বেলা পিয়ানোর ঢাকনার মতো খোলা হয় এবং রাতে বন্ধ হয়ে যায়। এটি সমস্ত সিস্টেমের জন্য রিচার্জিং প্রদান করে। একটি রেডিওআইসোটোপ তাপ উত্স (তেজস্ক্রিয় ক্ষয় ব্যবহার করে) অন্ধকারে সরঞ্জামগুলিকে উত্তপ্ত করে, যখন তাপমাত্রা +120 ডিগ্রি থেকে -170 এ নেমে যায়। যাইহোক, 1 চন্দ্র দিন 24 পার্থিব দিনের সমান। লুনোখডের উদ্দেশ্য ছিল চন্দ্রের মাটির রাসায়নিক গঠন এবং বৈশিষ্ট্য, সেইসাথে তেজস্ক্রিয় এবং এক্স-রে মহাজাগতিক বিকিরণ অধ্যয়ন করা। ডিভাইসটিতে দুটি টেলিভিশন ক্যামেরা (একটি ব্যাকআপ), চারটি টেলিফটোমিটার, এক্স-রে এবং রেডিয়েশন পরিমাপ যন্ত্র, একটি অত্যন্ত দিকনির্দেশক অ্যান্টেনা (পরে আলোচনা করা হয়েছে) এবং অন্যান্য ধূর্ত যন্ত্রপাতি ছিল।
"লুনোখোদ-1", বা একটি অ-শিশুদের রেডিও-নিয়ন্ত্রিত খেলনা
আমরা বিশদে যাব না - এটি একটি পৃথক নিবন্ধের জন্য একটি বিষয় - তবে কোনও না কোনও উপায়ে, লুনোখড 1 সেলিনে শেষ হয়েছে৷ একটি স্বয়ংক্রিয় স্টেশন তাকে সেখানে নিয়ে গিয়েছিল, অর্থাৎ সেখানে কোনও লোক ছিল না এবং চন্দ্র যন্ত্রটিকে পৃথিবী থেকে নিয়ন্ত্রণ করতে হয়েছিল। প্রতিটি ক্রু পাঁচ জন নিয়ে গঠিত: কমান্ডার, ড্রাইভার, ফ্লাইট ইঞ্জিনিয়ার, ন্যাভিগেটর এবং অত্যন্ত দিকনির্দেশক অ্যান্টেনা অপারেটর। পরেরটি নিশ্চিত করতে হবে যে অ্যান্টেনা সর্বদা পৃথিবীর দিকে "দেখবে", চন্দ্র রোভারের সাথে রেডিও যোগাযোগ সরবরাহ করে। পৃথিবী এবং চাঁদের মধ্যে আনুমানিক 400,000 কিমি দূরত্ব রয়েছে এবং রেডিও সংকেত, যার সাহায্যে ডিভাইসের গতিবিধি সংশোধন করা সম্ভব হয়েছিল, এই দূরত্বটি 1.5 সেকেন্ডে অতিক্রম করেছিল এবং চাঁদ থেকে ছবিটি তৈরি হয়েছিল - ভূদৃশ্যের উপর নির্ভর করে - 3 থেকে 20 সেকেন্ড পর্যন্ত। সুতরাং দেখা গেল যে চিত্রটি তৈরি হওয়ার সময়, চন্দ্র রোভারটি চলতে থাকে এবং চিত্রটি উপস্থিত হওয়ার পরে, ক্রুরা তাদের গাড়িটি ইতিমধ্যেই গর্তের মধ্যে সনাক্ত করতে পারে। প্রচণ্ড উত্তেজনার কারণে প্রতি দুই ঘণ্টা পর পর ক্রুরা একে অপরকে প্রতিস্থাপন করে।
এইভাবে, লুনোখোড-1, 3 পার্থিব মাসের অপারেশনের জন্য ডিজাইন করা হয়েছে, চাঁদে 301 দিন কাজ করেছে। এই সময়ে, তিনি 10,540 মিটার ভ্রমণ করেছেন, 80,000 বর্গ মিটার পরীক্ষা করেছেন, অনেক ফটোগ্রাফ এবং প্যানোরামা প্রেরণ করেছেন এবং আরও অনেক কিছু। ফলস্বরূপ, রেডিওআইসোটোপ তাপ উত্স তার সংস্থান নিঃশেষ করে দেয় এবং চন্দ্র রোভার "হিমায়িত" হয়।
"লুনোখোদ-২"
লুনোখোড-১-এর সাফল্য নতুন মহাকাশ কর্মসূচি লুনোখড-২ বাস্তবায়নে অনুপ্রাণিত করেছে। নতুন প্রকল্পটি তার পূর্বসূরীর থেকে চেহারায় প্রায় আলাদা ছিল না, তবে উন্নত করা হয়েছিল এবং 15 জানুয়ারী, 1973 সালে, লুনা-21 মহাকাশযান এটি সেলেনাকে সরবরাহ করে। দুর্ভাগ্যবশত, চন্দ্র রোভারটি মাত্র 4 পার্থিব মাস স্থায়ী হয়েছিল, কিন্তু এই সময়ে এটি 42 কিমি ভ্রমণ করতে এবং শত শত পরিমাপ এবং পরীক্ষা পরিচালনা করতে সক্ষম হয়েছিল।
আসুন ক্রু ড্রাইভার, ব্যায়াচেস্লাভ জর্জিভিচ ডভগানকে মেঝে দেওয়া যাক: “দ্বিতীয়টির সাথে গল্পটি বোকা হয়ে উঠল। তিনি ইতিমধ্যে চার মাস ধরে পৃথিবীর উপগ্রহে ছিলেন। 9 মে আমি হাল ধরেছিলাম। আমরা একটি গর্তের মধ্যে অবতরণ করেছি, নেভিগেশন সিস্টেম ব্যর্থ হয়েছে। কিভাবে বের হবে? আমরা একাধিকবার একই পরিস্থিতিতে নিজেদের খুঁজে পেয়েছি। তারপর তারা সহজভাবে সোলার প্যানেল ঢেকে বেরিয়ে গেল। এবং তারপর তারা আমাদের এটি বন্ধ না করতে এবং বের হওয়ার নির্দেশ দেয়। তারা বলে, আমরা এটি বন্ধ করে দিয়েছি, এবং চন্দ্র রোভার থেকে তাপ পাম্প করা হবে না, যন্ত্রগুলি অতিরিক্ত গরম হবে। আমরা তাড়িয়ে চান্দ্রের মাটিতে আঘাত করার চেষ্টা করেছি। এবং চন্দ্রের ধুলো এতই আঠালো... লুনোখোড প্রয়োজনীয় পরিমাণে সৌর শক্তি রিচার্জ করা বন্ধ করে দেয় এবং ধীরে ধীরে শক্তি হারিয়ে ফেলে। 11 মে, লুনোখোড থেকে আর কোনও সংকেত ছিল না।"
"লুনোখোদ-3"
দুর্ভাগ্যবশত, লুনোখোড-২ এবং আরেকটি অভিযান, লুনা-২৪-এর বিজয়ের পরে, চাঁদকে দীর্ঘ সময়ের জন্য ভুলে গিয়েছিল। সমস্যাটি ছিল যে তার গবেষণা, দুর্ভাগ্যবশত, বৈজ্ঞানিক নয়, রাজনৈতিক আকাঙ্ক্ষা দ্বারা প্রাধান্য পেয়েছিল। তবে নতুন অনন্য স্ব-চালিত যান "লুনোখোড -3" লঞ্চের প্রস্তুতি ইতিমধ্যেই সম্পন্ন হয়েছে, এবং আগের অভিযানে অমূল্য অভিজ্ঞতা অর্জনকারী ক্রুরা এটিকে চন্দ্রের গর্তের মধ্যে চালানোর জন্য প্রস্তুতি নিচ্ছিল। এই মেশিনটি, যা তার পূর্বসূরিদের সমস্ত সেরা গুণাবলী শোষণ করেছিল, সেই বছরগুলিতে সবচেয়ে উন্নত প্রযুক্তিগত সরঞ্জাম এবং সর্বশেষ বৈজ্ঞানিক যন্ত্রপাতি ছিল। একটি ঘূর্ণায়মান স্টেরিও ক্যামেরার দাম কত ছিল, যার পছন্দগুলি এখন 3D বলা ফ্যাশনেবল। এখন "লুনোখোদ-3" শুধুমাত্র S.A-এর নামে NPO-এর জাদুঘরের একটি প্রদর্শনী। লাভোচকিনা। অন্যায় ভাগ্য!
17 নভেম্বর প্রথম চন্দ্র স্ব-চালিত যান, লুনোখোড-1, চাঁদে পাঠানোর 40 বছর পূর্ণ হয়েছে।
17 নভেম্বর, 1970-এ, সোভিয়েত স্বয়ংক্রিয় স্টেশন "লুনা -17" চাঁদের পৃষ্ঠে স্ব-চালিত যান "লুনোখোড -1" সরবরাহ করেছিল, যা চন্দ্র পৃষ্ঠের ব্যাপক অধ্যয়নের উদ্দেশ্যে ছিল।
একটি চন্দ্র স্ব-চালিত যান তৈরি এবং উৎক্ষেপণ চাঁদের অধ্যয়নের একটি গুরুত্বপূর্ণ পর্যায়ে পরিণত হয়েছিল। একটি চন্দ্র রোভার তৈরির ধারণার জন্ম হয়েছিল 1965 সালে OKB-1 (এখন S.P. Korolev এর নামানুসারে RSC Energia)। সোভিয়েত চন্দ্র অভিযানের কাঠামোর মধ্যে লুনোখোডকে একটি গুরুত্বপূর্ণ স্থান দেওয়া হয়েছিল। দুটি চন্দ্র রোভারের প্রস্তাবিত চন্দ্র অবতরণ অঞ্চলগুলি বিশদভাবে পরীক্ষা করার এবং চন্দ্র জাহাজ অবতরণের সময় রেডিও বীকন হিসাবে কাজ করার কথা ছিল। চন্দ্র পৃষ্ঠে নভোচারী পরিবহনের জন্য চন্দ্র রোভার ব্যবহার করার পরিকল্পনা করা হয়েছিল।
চন্দ্র রোভার তৈরির ভার দেওয়া হয়েছিল মেশিন-বিল্ডিং প্ল্যান্টের নামে। এস.এ. লাভোচকিন (এখন S.A. লাভোচকিনের নামানুসারে NPO) এবং VNII-100 (বর্তমানে OJSC VNIITransmash)।
অনুমোদিত সহযোগিতা অনুসারে, মেশিন-বিল্ডিং প্ল্যান্টের নামকরণ করা হয়েছে S.A. ল্যাভোচকিন চন্দ্র রোভার তৈরি সহ পুরো মহাকাশ কমপ্লেক্স তৈরির জন্য দায়ী ছিলেন এবং ভিএনআইআই -100 একটি স্বয়ংক্রিয় গতি নিয়ন্ত্রণ ইউনিট এবং একটি ট্র্যাফিক সুরক্ষা ব্যবস্থা সহ একটি স্ব-চালিত চ্যাসি তৈরির জন্য দায়ী ছিল।
চন্দ্র রোভারের প্রাথমিক নকশা 1966 সালের শরত্কালে অনুমোদিত হয়েছিল। 1967 সালের শেষের দিকে, সমস্ত নকশার নথিপত্র প্রস্তুত ছিল।
ডিজাইন করা স্বয়ংক্রিয় স্ব-চালিত যান "লুনোখোদ-1" একটি মহাকাশযান এবং একটি সর্ব-ভূখণ্ডের যানের সংকর ছিল। এটি দুটি প্রধান অংশ নিয়ে গঠিত: একটি আট চাকার চ্যাসিস এবং একটি সিল করা যন্ত্রের ধারক।
চ্যাসিসের 8 টি চাকার প্রতিটি চালিত ছিল এবং চাকা হাবে অবস্থিত একটি বৈদ্যুতিক মোটর ছিল। পরিষেবা ব্যবস্থা ছাড়াও, চন্দ্র রোভারের যন্ত্রের ধারকটিতে বৈজ্ঞানিক সরঞ্জাম রয়েছে: চন্দ্রের মাটির রাসায়নিক গঠন বিশ্লেষণের জন্য একটি যন্ত্র, মাটির যান্ত্রিক বৈশিষ্ট্য অধ্যয়নের জন্য একটি যন্ত্র, রেডিওমেট্রিক সরঞ্জাম, একটি এক্স-রে টেলিস্কোপ এবং একটি ফরাসি পয়েন্ট-বাই-পয়েন্ট দূরত্ব পরিমাপের জন্য লেজার কোণার প্রতিফলক তৈরি। ধারকটির আকৃতি একটি কাটা শঙ্কুর মতো ছিল এবং শঙ্কুর উপরের ভিত্তিটি, যা তাপ মুক্তির জন্য রেডিয়েটর-কুলার হিসাবে কাজ করে, নীচেরটির চেয়ে একটি বড় ব্যাস ছিল। চাঁদনি রাতে, রেডিয়েটারটি ঢাকনা দিয়ে বন্ধ ছিল।
কভারের অভ্যন্তরীণ পৃষ্ঠটি সৌর কোষ দ্বারা আবৃত ছিল, যা চন্দ্র দিনে ব্যাটারির রিচার্জিং নিশ্চিত করে। অপারেটিং অবস্থানে, সৌর প্যানেলটি 0-180 ডিগ্রির মধ্যে বিভিন্ন কোণে অবস্থিত হতে পারে যাতে চন্দ্র দিগন্তের উপরে তার বিভিন্ন উচ্চতায় সূর্যের শক্তি সর্বোত্তমভাবে ব্যবহার করা যায়।
সৌর ব্যাটারি এবং রাসায়নিক ব্যাটারিগুলি এর সাথে একত্রে কাজ করে চন্দ্র রোভারের অসংখ্য ইউনিট এবং বৈজ্ঞানিক যন্ত্রগুলিতে বিদ্যুৎ সরবরাহ করতে ব্যবহৃত হয়েছিল।
যন্ত্রের বগির সামনের অংশে চন্দ্র রোভারের গতিবিধি নিয়ন্ত্রণ করার জন্য ডিজাইন করা টেলিভিশন ক্যামেরার জানালা ছিল এবং চন্দ্রপৃষ্ঠের পৃথিবীর প্যানোরামা এবং তারার আকাশ, সূর্য এবং পৃথিবীর অংশে প্রেরণ করা হয়েছিল।
চন্দ্র রোভারের মোট ভর ছিল 756 কেজি, সৌর ব্যাটারি কভার খোলার সাথে এর দৈর্ঘ্য ছিল 4.42 মিটার, প্রস্থ 2.15 মিটার, উচ্চতা 1.92 মিটার এটি চন্দ্র পৃষ্ঠে 3 মাসের অপারেশনের জন্য ডিজাইন করা হয়েছিল।
10 নভেম্বর, 1970-এ, বাইকোনুর কসমোড্রোম থেকে একটি তিন-পর্যায়ের প্রোটন-কে লঞ্চ যান, যা লুনোখড-1 স্বয়ংক্রিয় স্ব-চালিত যান সহ লুনা-17 স্বয়ংক্রিয় স্টেশনটিকে পৃথিবীর কক্ষপথের কাছে একটি মধ্যবর্তী বৃত্তাকারে চালু করেছিল।
পৃথিবীর চারপাশে একটি অসম্পূর্ণ কক্ষপথ সম্পন্ন করার পরে, উপরের পর্যায়টি স্টেশনটিকে চাঁদের ফ্লাইটের পথে রেখেছিল। 12 এবং 14 নভেম্বর, ফ্লাইট ট্র্যাজেক্টোরিতে পরিকল্পিত সংশোধন করা হয়েছিল। 15 নভেম্বর, স্টেশনটি চন্দ্র কক্ষপথে প্রবেশ করেছে। 16 নভেম্বর, আবার ফ্লাইট পথ সংশোধন করা হয়। 17 নভেম্বর, 1970 তারিখে, 6 ঘন্টা 46 মিনিট 50 সেকেন্ডে (মস্কো সময়), লুনা-17 স্টেশনটি নিরাপদে চাঁদে বৃষ্টির সাগরে অবতরণ করে। টেলিফটোমিটার ব্যবহার করে অবতরণ স্থানটি পরিদর্শন করতে এবং র্যাম্প স্থাপন করতে আড়াই ঘন্টা সময় লেগেছিল। আশেপাশের পরিস্থিতি বিশ্লেষণ করার পরে, একটি আদেশ জারি করা হয়েছিল এবং 17 নভেম্বর সকাল 9:28 এ, লুনোখোড-1 স্ব-চালিত যানটি চন্দ্রের মাটিতে পিছলে পড়ে।
লুনোখড পৃথিবী থেকে দূরবর্তীভাবে নিয়ন্ত্রিত হয়েছিল গভীর মহাকাশ যোগাযোগের কেন্দ্র থেকে। এটি নিয়ন্ত্রণ করার জন্য একটি বিশেষ ক্রু প্রস্তুত করা হয়েছিল, যার মধ্যে একজন কমান্ডার, ড্রাইভার, নেভিগেটর, অপারেটর এবং ফ্লাইট ইঞ্জিনিয়ার অন্তর্ভুক্ত ছিল। ক্রুদের জন্য, সামরিক কর্মীদের বাছাই করা হয়েছিল যাদের মোপেড সহ যানবাহন চালানোর অভিজ্ঞতা ছিল না, যাতে চন্দ্র রোভারের সাথে কাজ করার সময় পার্থিব অভিজ্ঞতা প্রাধান্য না পায়।
নির্বাচিত কর্মকর্তারা ক্রিমিয়ার একটি বিশেষ লুনোড্রোমে মহাকাশচারীদের মতোই প্রায় একই রকমের একটি মেডিকেল পরীক্ষা, তাত্ত্বিক প্রশিক্ষণ এবং ব্যবহারিক প্রশিক্ষণ দিয়েছিলেন, যা ছিল চন্দ্র ভূখণ্ডের সাথে অভিন্ন বিষণ্নতা, গর্ত, ত্রুটি এবং বিভিন্ন আকারের পাথরের বিচ্ছুরণ।
লুনোখড ক্রু, চন্দ্র টেলিভিশনের ছবি এবং পৃথিবীতে টেলিমেট্রিক তথ্য গ্রহণ করে, লুনোখডকে কমান্ড জারি করার জন্য একটি বিশেষ নিয়ন্ত্রণ প্যানেল ব্যবহার করেছিল।
আন্দোলনের প্রক্রিয়া সম্পর্কে অপারেটরের উপলব্ধির অভাব, টেলিভিশন ইমেজ কমান্ড এবং টেলিমেট্রিক তথ্যের অভ্যর্থনা এবং সংক্রমণে বিলম্ব এবং আন্দোলনের উপর স্ব-চালিত চ্যাসিসের গতিশীলতার বৈশিষ্ট্যের নির্ভরতার কারণে লুনোখোডের আন্দোলনের রিমোট কন্ট্রোলের নির্দিষ্ট বৈশিষ্ট্য ছিল। শর্ত (ত্রাণ এবং মাটির বৈশিষ্ট্য)। এটি চন্দ্র রোভারের পথে চলাচলের সম্ভাব্য দিক এবং বাধা সম্পর্কে কিছুটা আগাম প্রত্যাশা করতে ক্রুদের বাধ্য করেছিল।
প্রথম চন্দ্র দিন জুড়ে, চন্দ্র রোভারের ক্রুরা টেলিভিশনের অস্বাভাবিক চিত্রগুলির সাথে সামঞ্জস্য করেছিল: চাঁদের ছবিটি পেনাম্ব্রা ছাড়াই খুব বিপরীত ছিল।
ডিভাইসটি পালাক্রমে নিয়ন্ত্রিত হয়েছিল, ক্রুরা প্রতি দুই ঘন্টায় পরিবর্তিত হয়েছিল। প্রাথমিকভাবে, দীর্ঘতর সেশনের পরিকল্পনা করা হয়েছিল, কিন্তু অনুশীলন দেখায় যে দুই ঘন্টা কাজ করার পরে ক্রু সম্পূর্ণরূপে "ক্লান্ত" হয়ে গিয়েছিল।
প্রথম চন্দ্র দিনের সময়, লুনা -17 স্টেশনের অবতরণ এলাকা অধ্যয়ন করা হয়েছিল। একই সময়ে, লুনোখোড সিস্টেমগুলি পরীক্ষা করা হয়েছিল এবং ক্রুরা ড্রাইভিং অভিজ্ঞতা অর্জন করেছিল।
প্রথম তিন মাস, চন্দ্র পৃষ্ঠ অধ্যয়ন করার পাশাপাশি, লুনোখোড-1 একটি অ্যাপ্লিকেশন প্রোগ্রামও চালিয়েছিল: আসন্ন মনুষ্যবাহী ফ্লাইটের প্রস্তুতির জন্য, এটি চন্দ্রের কেবিনের জন্য অবতরণ এলাকা অনুসন্ধান করার অনুশীলন করেছিল।
20 ফেব্রুয়ারী, 1971 সালে, 4র্থ চন্দ্র দিবসের শেষে, চন্দ্র রোভারের প্রাথমিক তিন মাসের কাজের প্রোগ্রামটি সম্পন্ন হয়েছিল। রাজ্যের একটি বিশ্লেষণ এবং অন-বোর্ড সিস্টেমের অপারেশন চন্দ্র পৃষ্ঠে স্বয়ংক্রিয় যন্ত্রের সক্রিয় কার্যকারিতা চালিয়ে যাওয়ার সম্ভাবনা দেখায়। এই উদ্দেশ্যে, চন্দ্র রোভারের অপারেশনের জন্য একটি অতিরিক্ত প্রোগ্রাম তৈরি করা হয়েছিল।
মহাকাশযানের সফল অপারেশন 10.5 মাস স্থায়ী হয়েছিল। এই সময়ে, Lunokhod-1 10,540 মিটার ভ্রমণ করেছে, 200 টেলিফটোমেট্রিক প্যানোরামা এবং প্রায় 20 হাজার কম-ফ্রেমের টেলিভিশন ছবি পৃথিবীতে প্রেরণ করেছে। জরিপ চলাকালীন, ত্রাণের সবচেয়ে আকর্ষণীয় বৈশিষ্ট্যগুলির স্টেরিওস্কোপিক চিত্রগুলি প্রাপ্ত হয়েছিল, যা তাদের গঠনের বিশদ অধ্যয়নের অনুমতি দেয়।
লুনোখড-১ নিয়মিতভাবে চন্দ্রের মাটির ভৌত ও যান্ত্রিক বৈশিষ্ট্যের পরিমাপ, সেইসাথে চন্দ্রের মাটির পৃষ্ঠ স্তরের রাসায়নিক বিশ্লেষণ করে। তিনি চন্দ্র পৃষ্ঠের বিভিন্ন অংশের চৌম্বক ক্ষেত্র পরিমাপ করেন।
চন্দ্র রোভারে স্থাপিত ফরাসি প্রতিফলকের পৃথিবী থেকে বিস্তৃত লেজার 3 মিটার নির্ভুলতার সাথে পৃথিবী থেকে চাঁদের দূরত্ব পরিমাপ করা সম্ভব করেছে।
15 সেপ্টেম্বর, 1971-এ, একাদশ চন্দ্র রাতের শুরুতে, চন্দ্র রোভারের সিল করা পাত্রের ভিতরের তাপমাত্রা কমতে শুরু করে, কারণ রাতের গরম করার ব্যবস্থায় আইসোটোপ তাপ উৎসের সংস্থান শেষ হয়ে গিয়েছিল। 30 সেপ্টেম্বর, 12 তম চন্দ্র দিবস চন্দ্র রোভারের সাইটে পৌঁছেছিল, কিন্তু ডিভাইসটি কখনই যোগাযোগ করেনি। ১৯৭১ সালের ৪ অক্টোবর তার সাথে যোগাযোগের সকল চেষ্টা বন্ধ হয়ে যায়।
চন্দ্র রোভারের সক্রিয় অপারেশনের মোট সময় (301 দিন 6 ঘন্টা 57 মিনিট) প্রযুক্তিগত বৈশিষ্ট্যে উল্লেখ করা সময়ের চেয়ে 3 গুণ বেশি ছিল।
লুনোখোদ 1 চাঁদে রয়ে গেছে। এর সঠিক অবস্থান দীর্ঘদিন ধরে বিজ্ঞানীদের কাছে অজানা ছিল। প্রায় 40 বছর পরে, ক্যালিফোর্নিয়া বিশ্ববিদ্যালয়ের অধ্যাপক টম মারফির নেতৃত্বে পদার্থবিদদের একটি দল, সান দিয়েগো, আমেরিকান লুনার রিকনেসেন্স অরবিটার (এলআরও) দ্বারা তোলা ছবিতে লুনোখড 1 খুঁজে পায় এবং অসঙ্গতি খুঁজে বের করার জন্য একটি বৈজ্ঞানিক পরীক্ষার জন্য এটি ব্যবহার করে। আপেক্ষিকতার সাধারণ তত্ত্ব আলবার্ট আইনস্টাইন দ্বারা বিকাশিত। এই গবেষণার জন্য, বিজ্ঞানীদের চাঁদের কক্ষপথকে নিকটতম মিলিমিটারে পরিমাপ করতে হবে, যা লেজার বিম ব্যবহার করে করা হয়।
22শে এপ্রিল, 2010-এ, আমেরিকান বিজ্ঞানীরা নিউ মেক্সিকোতে (মার্কিন যুক্তরাষ্ট্র) অ্যাপাচি পয়েন্ট অবজারভেটরিতে 3.5-মিটার টেলিস্কোপের মাধ্যমে প্রেরিত একটি লেজার রশ্মি ব্যবহার করে সোভিয়েত যন্ত্রপাতির কোণার প্রতিফলককে "গ্রোপ" করতে সক্ষম হন এবং প্রতিফলিত প্রায় 2 হাজার ফোটন গ্রহণ করেন। "লুনোখোদ-1"।
উপাদান খোলা উত্স থেকে তথ্যের ভিত্তিতে প্রস্তুত করা হয়েছিল